Air Bearing Platform
- Sep 13, 2017
- 2 min read
Since January 2017 I have been working on developing an Air Bearing Platform (ABP) at the Space Engineering Research Center in Marina Del Rey, CA. I want to step through the subsystems I worked on and some of the issues and solutions I came across. First, check out the videos below, which show how the Air Bearing Platform currently runs.
This video is the point-to-point navigation capabilities. Basically, you can place the ABP anywhere on the table and upload a destination point (which must be on the table) and the ABP will autonomously navigate to the destination point.
This video demonstrates the ABP's ability to negate angular velocity - also known as "tumbling" in orbit.
One of the biggest issues with getting the point-to-point navigation algorithm to work properly was finding a way to get accurate orientation. Magnetometers usually provide a good enough solution as you can see here. They provide accurate positioning by calculating their deviation from magnetic north. The problem is they work really well when there are no magnetic perturbations. Unfortunately, the room I was working in contained large metal objects which were skewing the magnetic readings substantially.
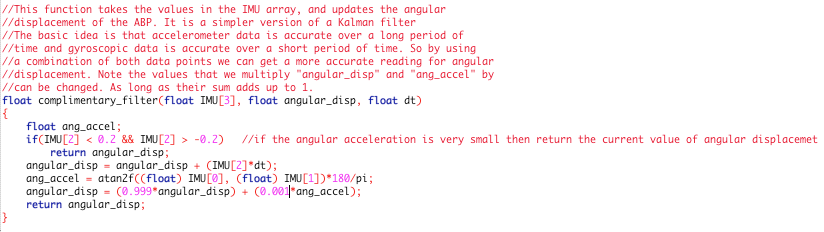
I needed a way to determine (within 1 degree of accuracy) the ABP's orientation using data from the gyroscope and accelerometer. The answer came partially from a technique called a complimentary filter. Below is the first orientation test using the complimentary filter.

The ABP was rotated 90 degrees and held at that position. Notice that the angular displacement approaches zero as I held the ABP steady. The way I got around this issue was by adding a line of code that would use the previous value of the orientation if the accelerometer data was reading very small values. See code below
After making the adjustment in the code the new results were much better


Comments